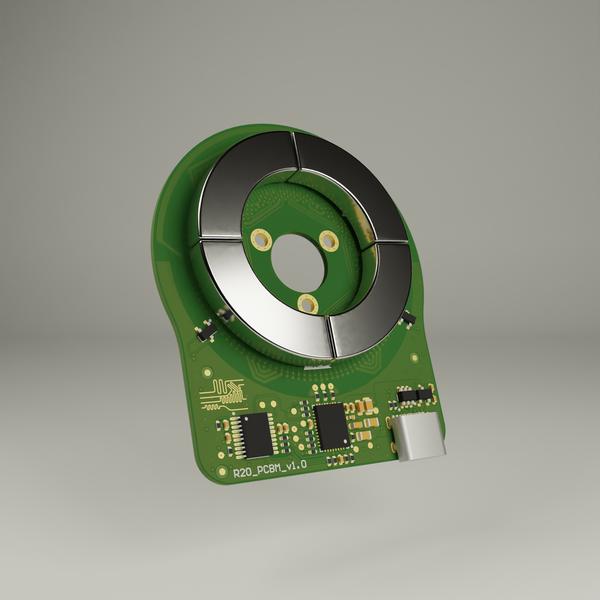
R20 PCB Motor
L’objectiu d’aquest projecte era crear un motor PCB petit, altament eficient i extremadament assequible. El disseny en “pinta” permet una major eficiència i densitat de parell.
El motor PCB en Pinta redefineix el que és possible en solucions de motors accessibles, eficients i versàtils.
- Alimentat per USB-C: Funciona amb una connexió USB-C estàndard, cosa que el fa increïblement fàcil d’utilitzar i compatible amb fonts d’alimentació modernes.
- Fabricació econòmica: Dissenyat amb simplicitat i escalabilitat en ment, és extremadament assequible de produir—perfecte tant per a aficionats com per a aplicacions a gran escala.
- Eficient: L’estator en forma de pinta maximitza l’eficiència eliminant pèrdues de parell, assegurant un rendiment òptim fins i tot en condicions exigents.
- Integració senzilla: Totalment personalitzable, el motor es pot modificar fàcilment o integrar directament en qualsevol projecte que requereixi una solució de motor compacta i econòmica.
- Capacitats de control avançat: El control integrat de posició, velocitat i parell ofereix un nivell de precisió i flexibilitat normalment reservat a sistemes molt més cars.
En resum, aquest motor PCB combina un disseny innovador amb la practicitat, fent-lo una elecció ideal per a enginyers, creadors i innovadors d’arreu.
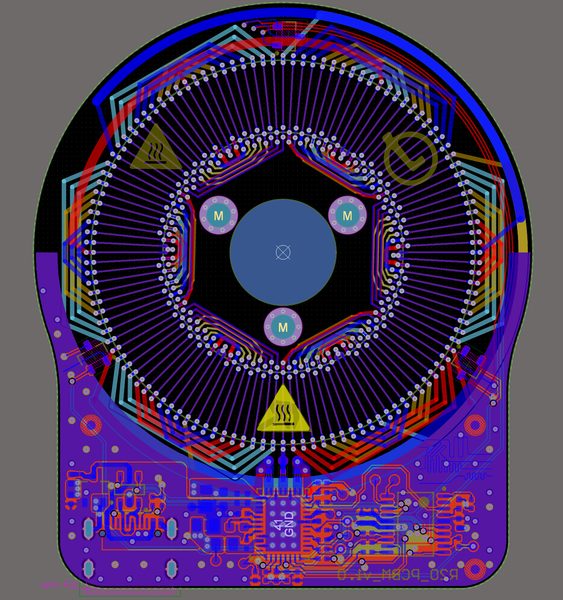
Layout
El motor PCB en Pinta està construït sobre una estructura de PCB de 4 capes.
El disseny en pinta assegura que tota l’àrea de coure sota els imants contribueixi a produir parell, augmentant l’eficiència i la densitat de parell.
Un circuit de control de motor simple i eficient està integrat a la mateixa PCB, incloent-hi:
- Sensors Hall per a una conmutació precisa i un funcionament eficient a baixa velocitat.
- Un microcontrolador que permet accions de control avançades com el control en bucle tancat de posició i velocitat.
- La personalització completa del layout permet adaptar la velocitat objectiu, el parell i la tensió/corrent de funcionament a cada aplicació específica.
Simulacions
Abans de fabricar cap maquinari, àmplies simulacions van guiar el disseny:
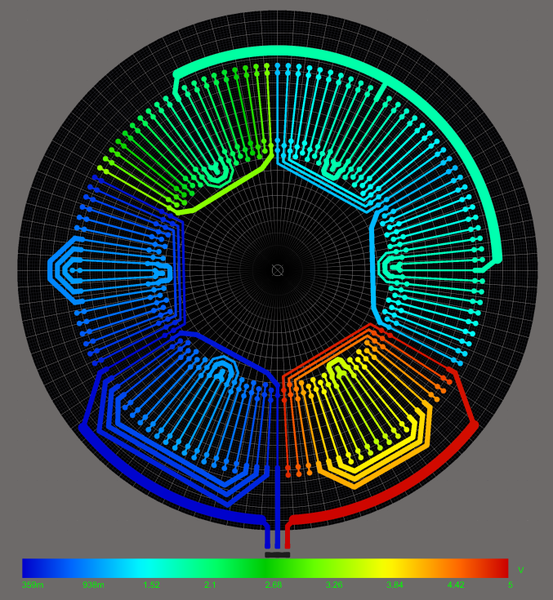
- Simulació PDN:
Es van realitzar diverses iteracions de simulacions PDN per optimitzar l’ús del coure.
La primera iteració va mostrar que la distribució de coure no era òptima (les zones vermelles s’havien de fer més gruixudes) i que els vies suportaven massa corrent.
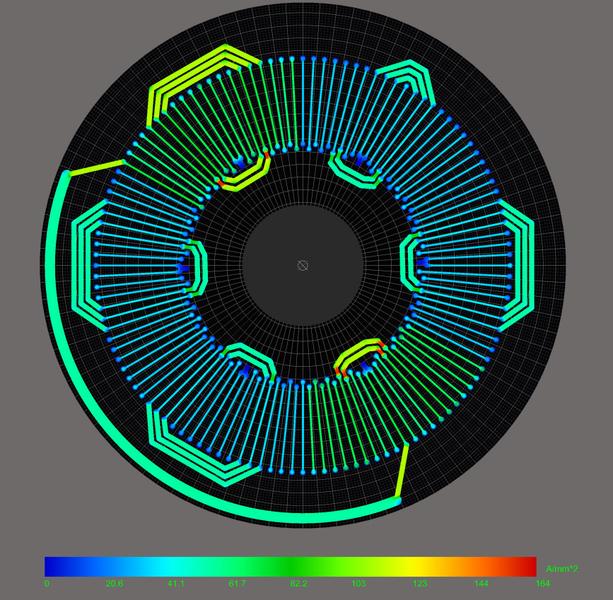
Duplicar el nombre de vies i augmentar l’amplada de pistes en parts crítiques va donar resultats prometedors.
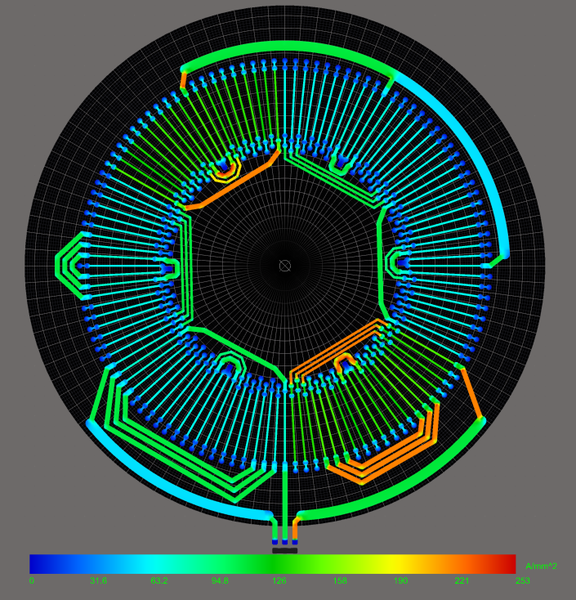
- Resistència i maneig de corrent:
La resistència DC es va estimar a partir dels resultats PDN (770 mΩ previstos).
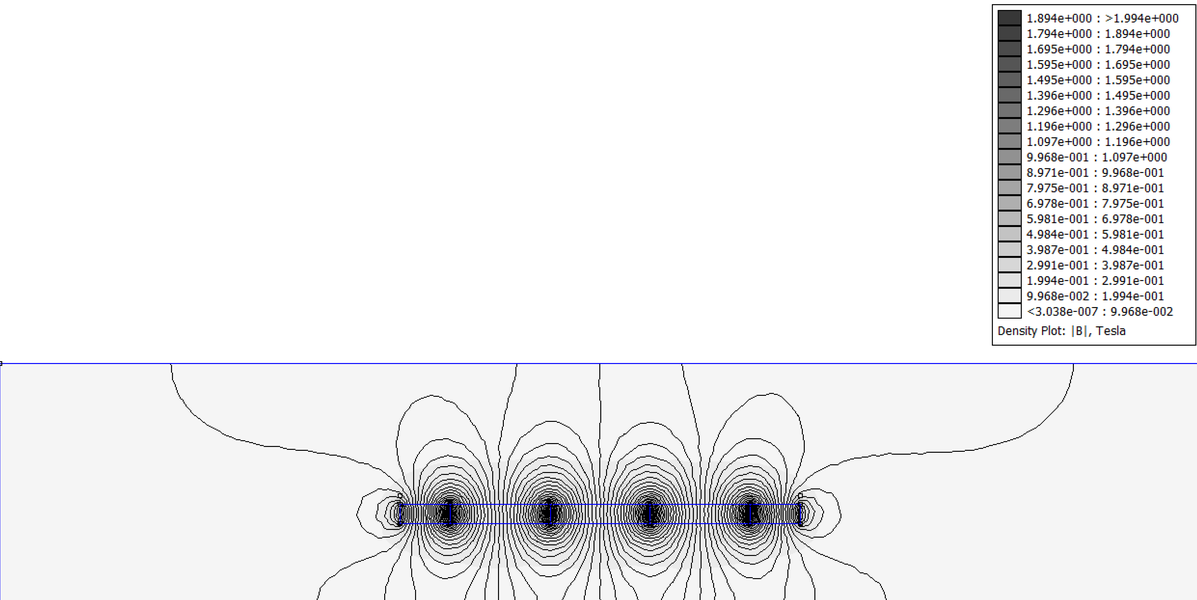
- Simulacions magnètiques FEMM:
Es va utilitzar FEMM per modelar el camp magnètic que experimenten les pistes de l’estator.
- Simulacions de força de Lorentz i parell:
Les dades FEMM es van importar a MATLAB, on es van calcular les forces de Lorentz i el parell resultant.
Constants estimades:
- Kt: 1,48 mNm/A
- Kv: 6452 RPM/V
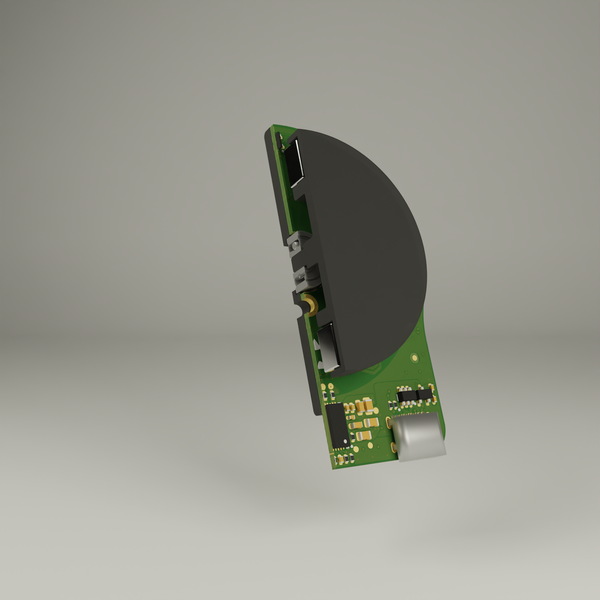
Disseny mecànic
L’estructura mecànica és senzilla:
- Estator: La mateixa PCB.
- Suport de coixinet: Imprès en 3D i cargolat a la PCB.
- Rotor: Imprès en 3D, subjecta els imants i s’ajusta a pressió al coixinet.
Resultats
Es van rebre i muntar les PCBs i les peces mecàniques.

Les primeres proves van revelar diverses lliçons:
- Cargols ferromagnètics: Provocaven parell de dentat; es van substituir per acer inoxidable/cola CA.
- Joc al coixinet: Un sol coixinet provocava joc axial; les versions futures en faran servir dos.
- Sensors Hall: Dos estaven intercanviats; es va corregir amb rework.
Aquestes primeres proves van confirmar la viabilitat bàsica del motor tot assenyalant detalls mecànics a refinar en futures versions.
Proves
Un cop fabricat, el motor es va caracteritzar completament per validar el disseny i les metodologies de simulació utilitzades.
- Prova Kv: 6450 RPM/V mesurats, coincidint molt de prop amb les simulacions. Aquest resultat positiu destaca com de personalitzable pot ser un motor PCB.
- Prova de resistència: 651 mΩ mesurats. Una mica més baixa que la simulació, variació esperada degut a la variabilitat del gruix final del coure en el procés de fabricació de PCBs.

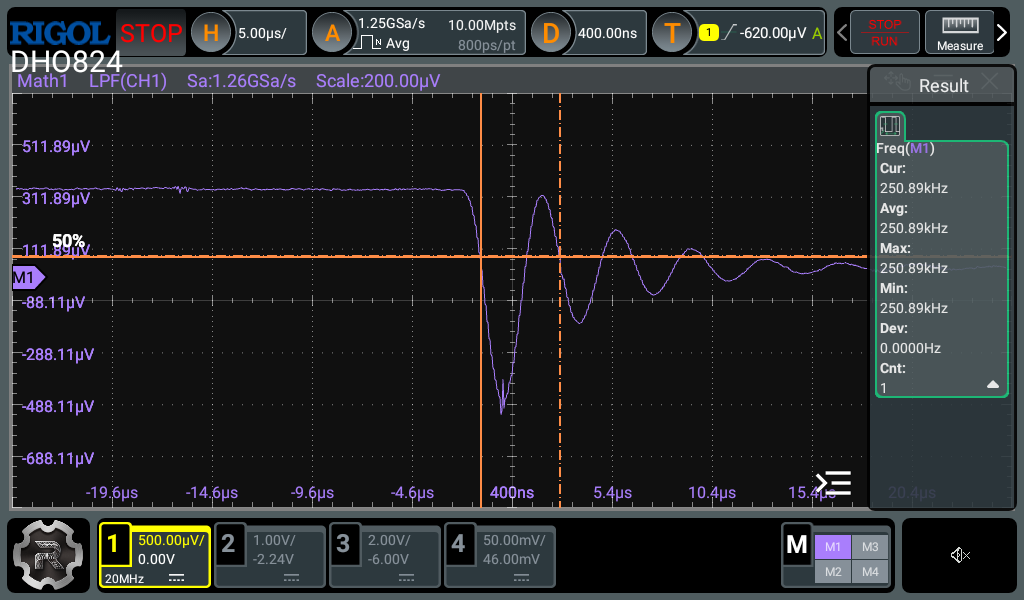
- Prova d’inductància: 2 µH mesurats. Els motors PCB solen tenir baixa inductància, i el circuit de control es va dissenyar per gestionar aquestes característiques sense problema.
Control
El motor PCB en Pinta inclou modes de control bàsics però potents gràcies als sensors Hall i al microcontrolador integrats.
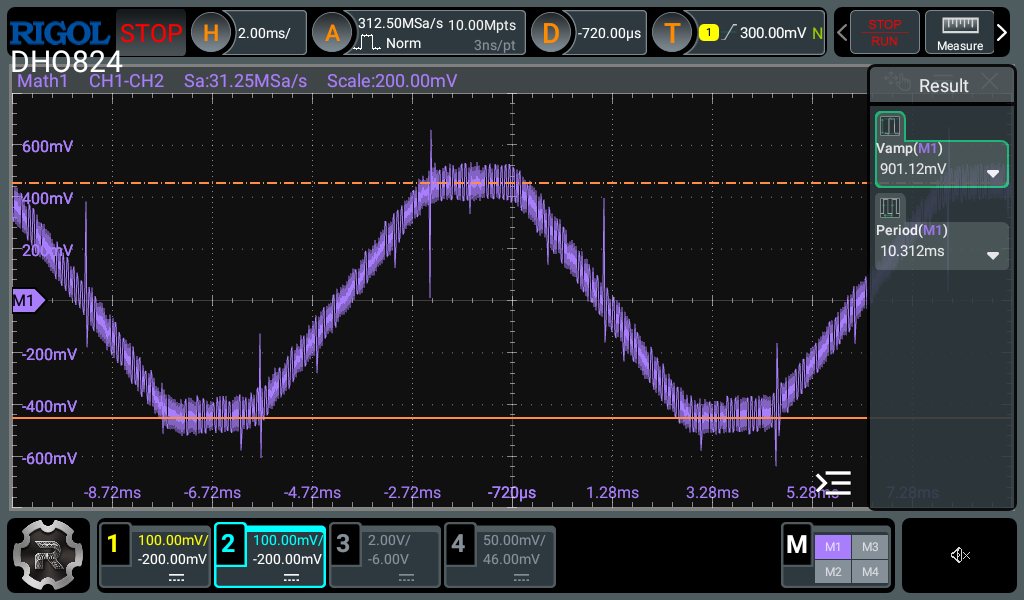
- Mode de control de velocitat: Control de velocitat en bucle tancat. En aquest mode, el motor ajusta el senyal de conducció basant-se en el feedback per igualar la velocitat desitjada, proporcionant un moviment suau i estable fins i tot amb canvis de càrrega.
- Mode de control de posició: Control senzill de posició en bucle tancat. El motor es mou i manté posicions específiques del rotor, fent-lo útil per a aplicacions de robòtica i actuadors.
Aquests resultats de control demostren les grans capacitats del disseny, obrint la porta a aplicacions en bucle tancat encara més avançades en el futur.
Firmware
El firmware que fa funcionar el motor està basat en un microcontrolador STM32 i va ser desenvolupat íntegrament des de zero. Realitza diverses tasques clau:
- Lectura dels sensors Hall: Llegeix contínuament els estats dels sensors Hall per decodificar la posició del rotor i estimar la velocitat del motor.
- Conmutació i control: Basant-se en la posició decodificada, el MCU gestiona els patrons de conmutació i aplica les lleis de control.
- Interfície amb l’etapa de potència: Es comunica amb el circuit d’etapa de potència a través de senyals de control de portes i comunicació SPI.
- Control en bucle tancat: Tant els bucles de velocitat com de posició es tanquen a una freqüència d’1 kHz, permetent una resposta dinàmica suau i una actuació precisa.